Quattro with Dynamic Torque Control adalah evolusi penggerak quattro yang berfokus pada satu hal krusial yaitu presisi saat mobil berada dekat batas kemampuannya. Teknologi ini diperkenalkan Audi pada RS 5 sebagai sistem torque vectoring elektromekanis di gardan belakang, yang bekerja bukan hanya cepat, tetapi juga cerdas dalam membaca situasi berkendara.
Inti sistem ini adalah motor listrik permanen berpendingin air dengan output 8 kW dan 40 Nm, yang bertugas sebagai aktuator. Motor ini terhubung dengan overdrive gears dan diferensial konvensional ber-lock rendah, memungkinkan distribusi torsi antar roda belakang dilakukan secara aktif. Dalam waktu hanya 15 milidetik, sistem mampu menciptakan perbedaan torsi hingga 2.000 Nm, nyaris seketika dari sudut pandang pengemudi.
Keunggulan utama pendekatan elektromekanis adalah kemampuannya bekerja dua arah. Tidak seperti sistem mekanis murni yang bergantung pada arah gaya, Dynamic Torque Control tetap presisi saat akselerasi, saat lepas gas, bahkan ketika pengereman keras. Artinya, potensi sistem selalu tersedia, tanpa jeda dan tanpa bias kondisi.
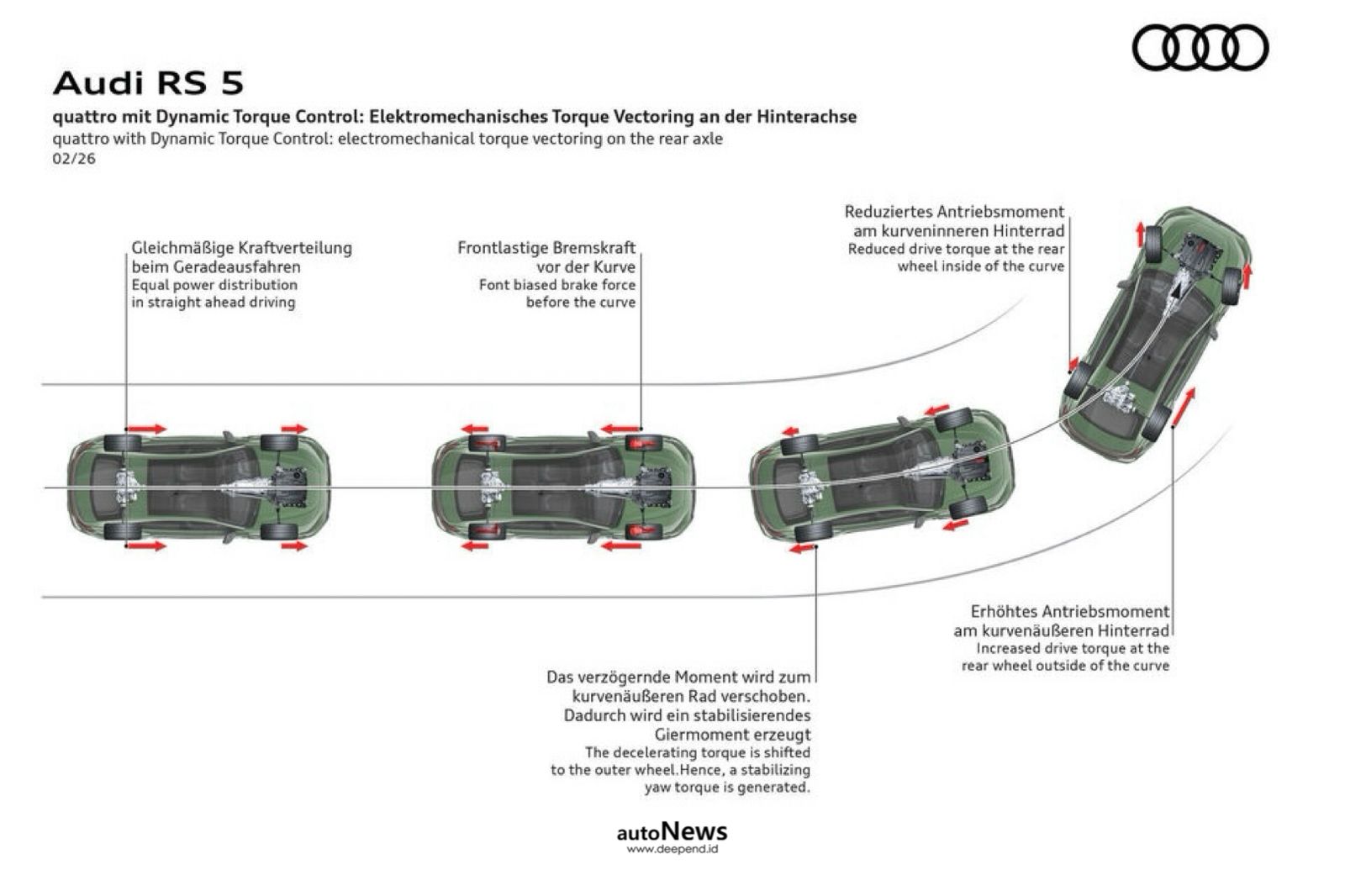
Dalam praktiknya, saat mobil melaju lurus, torsi dibagi merata untuk stabilitas dan traksi. Ketika memasuki tikungan, sistem menciptakan diferensial torsi yang membantu menstabilkan arah. Di fase keluar tikungan, torsi dialihkan ke roda luar untuk membantu rotasi mobil dan memaksimalkan akselerasi. Hasilnya adalah mobil yang terasa lebih lincah, namun tetap terkendali.
Semua keputusan ini dikendalikan oleh driving dynamics controller (HCP1), yang bekerja pada frekuensi 200 Hz. Controller ini memproses input pengemudi, seperti kemudi, gas, rem, bersama data kendaraan seperti G-force, yaw rate, slip angle, dan estimasi grip permukaan jalan. Setiap lima milidetik, ia menghitung torsi ideal yang harus dikirim ke masing-masing roda belakang.
Kesimpulannya, quattro with Dynamic Torque Control menyatukan kelincahan, stabilitas, dan keamanan dalam satu sistem terpadu. Ia memberikan karakter berkendara yang lebih presisi dan komunikatif, bukan dengan membuat mobil terasa liar, tetapi dengan membuat pengemudi merasa selalu selangkah lebih siap, bahkan saat berada di batas kendali. ![]()





